Workshop
- A small overview of the
Bavarian-Hungarian Self-driving vehiclesworkshop. - Date: 2023.11.03.
- Place: Győr, Hungary.
megoldas_zala23 ROS 1 package
🤖 In the following a very simple wall/gap following approach will be presented and described. The origin of he code is based on the work of Suresh Babu (University of Virginia, license). Link to the original code: github.com/linklab-uva/f1tenth_gtc_tutorial.
The name of the package is a comes from a hungarian expression (megoldas: solution / Lösung).
The robot used in the competition
Wheeltec / Roboworks Rosbot mini Ackermann robot 
On-board computer
- Nvidia Jetson Nano
Sensors
- Orbbec Depth Camera
- LSN10 LIDAR
Video
Usage
Prerequisites:
- WiFi-enabled computer with Ubuntu 18.04 / 20.04 operating system and ROS Melodic / Noetic installation
- Internet access (Ethernet cable or WiFi)
- Turn on the robot platform.
- Use the computer to connect to the WiFi network created by the robot. The name of the WiFi network is unique for each robot platform, the
#at the end of the SSID changes according to the number of the robot platform:SSID: WHEELTEC_CAR_5.5_# Password: dongguan - Use SSH to connect to the on-board computer of the robot platform with the following terminal command:
ssh wheeltec@192.168.0.100A password will be required, the default password is
dongguan
Internet access on the robot platform
Software packages can be downloaded to the on-board computer of the robot platform, which requires internet access.
- Ethernet: connect the Ethernet cable to the Ethernet port of the on-board computer of the robot platform.
- WiFi: after issuing the
nmtuiterminal command, connect to the available WiFi network.nmtui

Install the ROS 1 package
After installation, the functions of the robot platform can be accessed using ROS. The sample solution of the competition can also be deployed by ROS.
Create a workspace and install the sample solution on the robot:
mkdir -p ~/workshop_ws/src
cd ~/workshop_ws/
catkin init
cd ~/workshop_ws/src/
git clone https://github.com/robotverseny/megoldas_zala23
cd ~/workshop_ws/
catkin build megoldas_zala23
echo "source /home/wheeltec/workshop_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
Install screen
sudo apt install mc screen
Install jks visualization rviz plugin: depending on ROS 1 version (melodic / noetic):
sudo apt install ros-melodic-jsk-rviz-plugins
sudo apt install ros-noetic-jsk-rviz-plugins
Usage
Start solution using screen (recommended)
The script verseny_start.sh sets the required environmental variables, starts the ROS nodes and finally after 2 minutes stops everything. Have a look at the code: verseny_start.sh
rosrun megoldas_zala23 verseny_start.sh
The verseny_start.sh shell script usually launches several virtual terminals, such as: roscore, turn_on_wheeltec_robot, lsn10_lidar, megoldas1.launch. All components of the solution can be stopped with the following command:
rosrun megoldas_zala23 stop_all.sh
Further commands:
- list screen:
screen -ls - restore screen:
screen -r roscore/screen -r turn_on_wheeltec_robot/screen -r megoldas1 - detach:
Ctrl-a+Ctrl-d
ROS connection
The ROS topics advertised by the robot platform are also available on the computer connected to the platform, with the appropriate setting of the ROS_MASTER_URI variable:
export ROS_MASTER_URI=http://192.168.0.100:11311
After the appropriate setting of the variable, the topics can be listed and visualized using Rviz:
rostopic list
rosrun rviz rviz
Some explanatory animations
roslaunch megoldas_zala23 rviz1.launch

Start solution per component
The solution can also be started per component, not just as a single shell script. This requires four terminal windows on the on-board computer of the robot platform and issuing the following commands per terminal:
roscore
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
roslaunch lsn10 lsn10.launch
roslaunch megoldas_zala23 megoldas1.launch
Additional information
Workspaces
~/wheeltec_robot/src
~/catkin_workspace/src
~/workshop_ws/src/
Topic management
rostopic hz /scan
rostopic echo /scan -n1
rostopic type /scan
sensor_msgs/LaserScan
Robot platform language settings
sudo dpkg-reconfigure locales
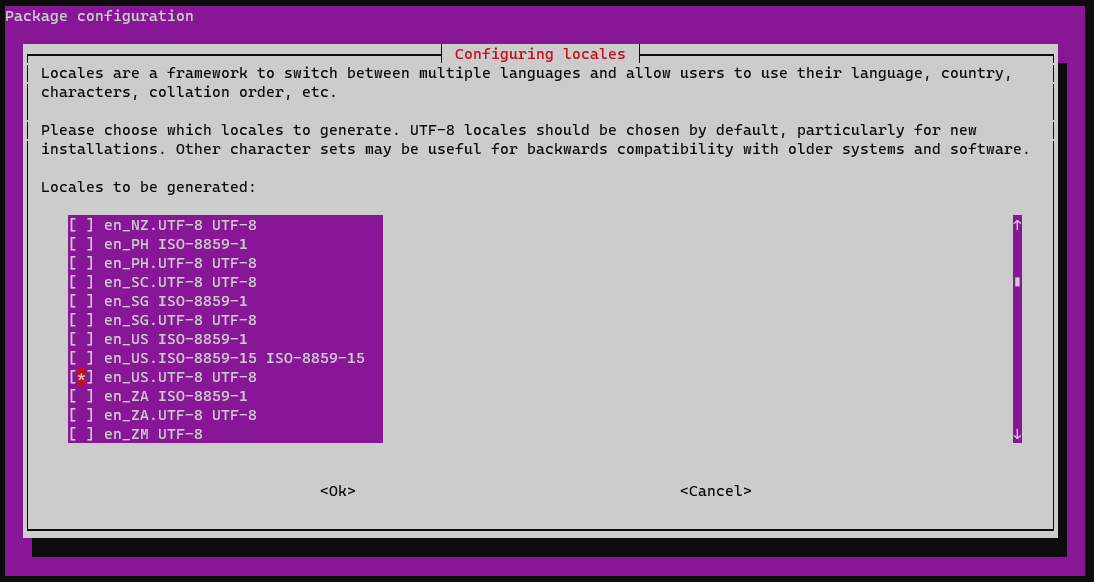
reboot
Rosbag management
cd ~/rosbags
rosbag record -a -o test1
rsync -avzh --progress wheeltec@192.168.0.100:/home/wheeltec/rosbags/ /mnt/c/bag/wheeltec/
rosbag info test1_2023-03-30-12-37-22.bag
rosbag play test1_2023-03-30-12-37-22.bag
You can even visualize rosbags in Foxglove studio: