Home
megoldas_zala23 ROS package
🤖 Autonóm robotverseny zalaegerszegi forduló megoldás template 2023
A versenyen használt robot
Wheeltec / Roboworks Rosbot mini Ackermann robot 
Fedélzeti számítógép
- Nvidia Jetson Nano
Érzékelők
- Orbbec Depth Camera
- LSN10 LIDAR
Használat
Előkövetelmények:
- WiFi kapcsolatra képes számítógép, Ubuntu 18.04 operációs rendszerrel és ROS Melodic telepítéssel
- Internet hozzáférés (Ethernet kábel vagy WiFi)
- Kapcsoljuk be a robotplatformot.
- A számítógéppel csatlakozzunk a robot által létrehozott WiFi hálózatra. A WiFi hálózat neve minden robotplatform esetében egyedi, az SSID végén a # a robotplatform száma szerint változik:
SSID: WHEELTEC_CAR_5.5_# Jelszó: dongguan - SSH-val csatlakozzunk a robotplatform fedélzeti számítógépére az alábbi terminálutasítással:
ssh wheeltec@192.168.0.100
Az utasítás kiadását követően jelszóra lesz szükség. Az alapértelmezett jelszó: dongguan
Internet hozzáférés a robotplatformon
A robotplatform fedélzeti számítógépére szoftvercsomagok tölthetők le, ehhez internet hozzáférés biztosítása szükséges. Megjegyzés: a példamegoldás telepítése már megtörtént, interent hozzáférés biztosítása opcionális.
- Ethernet: csatlakoztassuk az Ethernet kábelt a robotplatform fedélzeti számítógépének Ethernet portjába.
vagy
- WiFi: nmtui terminálutasítás kiadását követően csatlakozzunk az elérhető WiFi hálózatra.
nmtui

ROS példamegoldás telepítése
Beüzemelést követően ROS segítségével érhetőek el a robotplatform funkciói. A verseny példamegoldása is ROS által üzemelhető be. A verseny során használt robotok esetében a telepítés már megtörtént, ez a lépés kihagyható! Folytatás: ROS példamegoldás beüzemelése.
- Workspace létrehozása és megoldás telepítése
mkdir -p ~/megoldas_ws/src cd ~/megoldas_ws/ catkin init cd ~/megoldas_ws/src/ git clone https://github.com/robotverseny/megoldas_zala23 cd ~/megoldas_ws/ catkin build megoldas_zala23 echo "source /home/wheeltec/megoldas_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc screentelepítésesudo apt install mc screenROS példamegoldás beüzemelése
Megoldás indítása screen segítségével (javasolt)
rosrun megoldas_zala23 verseny_start.sh
A verseny_start.sh shell script gyszerre több viruális terminalt indít, úgy, mint: roscore, turn_on_wheeltec_robot, lsn10_lidar, megoldas1.launch. A megoldás minden komponense az alábbi paranccsal állítható le:
rosrun megoldas_zala23 stop_all.sh
További kezelés:
- list screen:
screen -ls - restore screen:
screen -r roscore/screen -r turn_on_wheeltec_robot/screen -r megoldas1 - detach:
Ctrl-a+Ctrl-d
ROS csatlakozás
A robotplatform által hirdetett ROS topicok a platformhoz csatlakozó számítógépen is elérhetőek, a ROS_MASTER_URI változó megfelelő beállításával:
export ROS_MASTER_URI=http://192.168.0.100:11311
A változó megfelelő beállítását követően a topicok listázhatóak, Rviz segítségével vizualizálhatóak:
rostopic list
rosrun rviz rviz
Példamegoldás működésének szemléltetése
roslaunch megoldas_zala23 rviz1.launch

Megoldás indítása komponensenként
A megoldás komponensenként is elindítható. Ehhez a robotplatform fedélzeti számítógépén négy terminálablakra, és terminálonként az alábbi utasítások kiadására van szükség:
roscore
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
roslaunch lsn10 lsn10.launch
roslaunch megoldas_zala23 megoldas1.launch
Kiegészítő információk
Workspace-ek
~/wheeltec_robot/src
~/catkin_workspace/src
~/megoldas_ws/src/
Topic kezelés
rostopic hz /scan
rostopic echo /scan -n1
rostopic type /scan
sensor_msgs/LaserScan
Robotplatform nyelvi beállításai
sudo dpkg-reconfigure locales
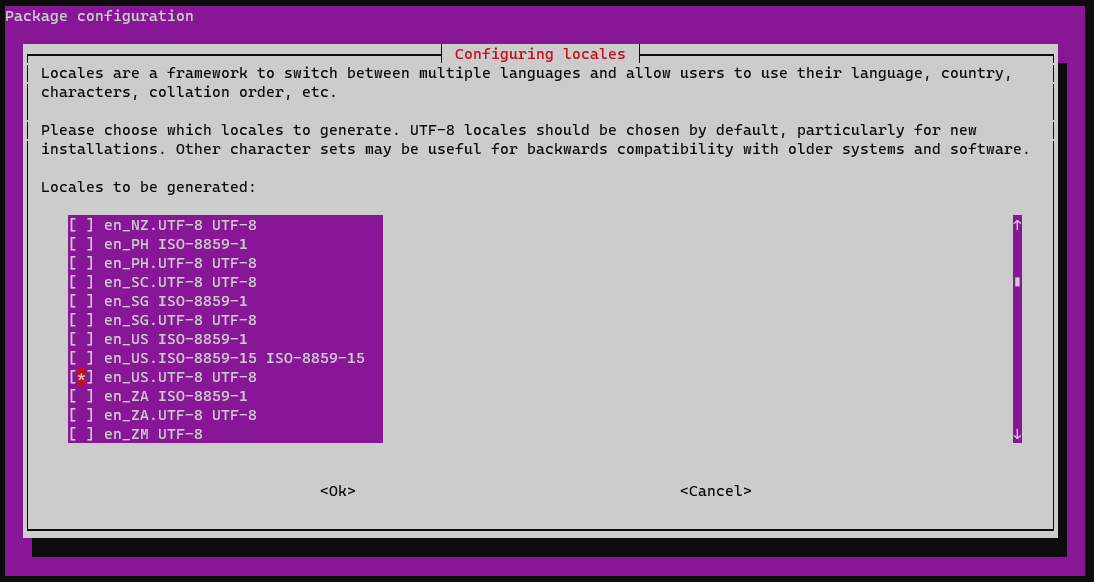
reboot
Rosbag kezelése
cd ~/rosbags
rosbag record -a -o teszt1
rsync -avzh --progress wheeltec@192.168.0.100:/home/wheeltec/rosbags/ /mnt/c/bag/wheeltec/
rosbag info teszt1_2023-03-30-12-37-22.bag
rosbag play teszt1_2023-03-30-12-37-22.bag